22 February، 2022
PH.D Dissertation on “Fault Diagnosis of a Robot Based on New Separable Wavelet/Slantlet Filters and Intelligent Strategies”

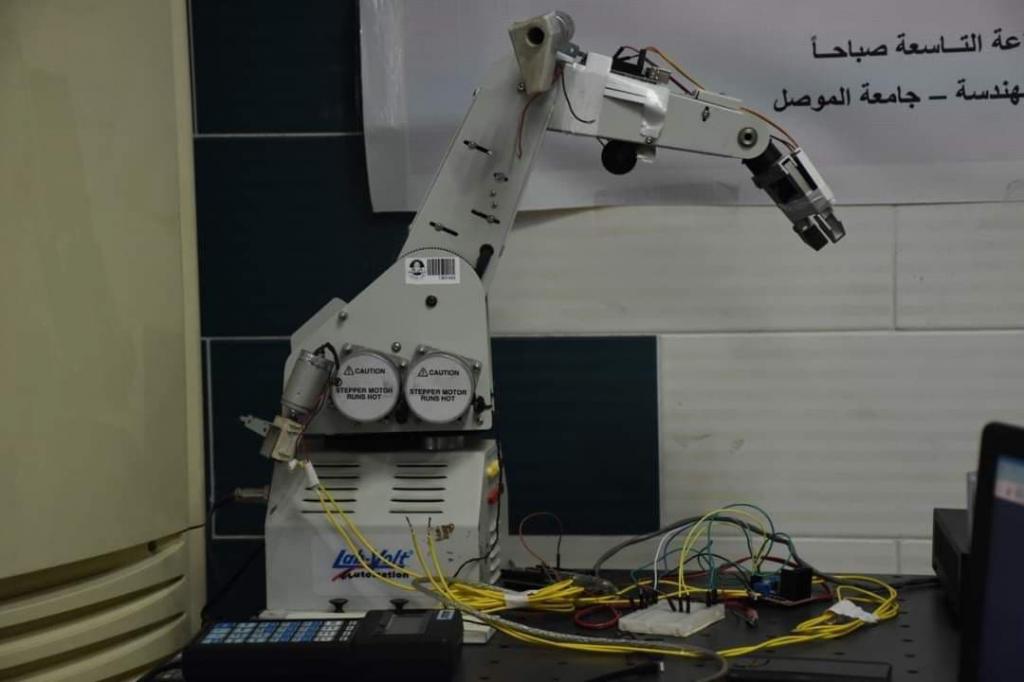
A PH.D dissertation was discussed in Department of Computer Engineering / College of Engineering at University of Mosul entitled “Fault Diagnosis of a Robot Based on New Separable Wavelet/Slantlet Filters and Intelligent Strategies” submitted by ( Muhamad Azhar Abdilatef Al-Obaidy ), Supervised by Prof. Dr. Jassim M. Abdul-Jabbar and Asst. Prof. Dr. Saad Z. Alkhayat on Tuseday, Feb. 22, 2022.In this dissertation, a classifications are achieved for different types of faults in robot arm systems using two types of fist-step-diagnosis methods; namely, feature extractions. The faults are supposed to occur in joints as vibrations which lead to faulty arm position, velocity and acceleration. A discrete wavelet transform (DWT) and Slantlet transform (SLT) are used for the purpose feature extraction as a first fault detection step, while both multilayer perceptron-artificial neural network (MLP-ANN) and recurrent neural network (RNN) are individually depended for the purpose of classification with performance-comparison. These methods are applied for two types of robot arm systems (planar and space) through simulation and a real robot arm system LabVolt 5150.The obtained results for both real system and simulations highlight that SLT is preferred to be used when different types of faults happen or supposed to be happened at a time and when many joints are disturbed simultaneously. According to the accuracy results and the elapsed time for the process of adopting DWT and SLT, it is recommended to use SLT for the purpose of fault diagnosis in a real time system, especially when different faults occur in different joints.